وبلاگ معرفی محصولات هانیانگ
TPR چیست؟ مفهوم PID
آبان
- مقدمه :
بیش از نیم قرن از حضور انواع کنترل کننده در صنعت های مختلف می گذرد. با گذشت زمان، “کنترل” نقش مهمی را در سیستم های اتوماسیون صنعتی ایفا میکند. به نحوی که وابستگی تولید در انواع خطوط به کنترل و کنترل کننده امری انکارناپذیر شده است. لذا با توجه به نیاز امروز صنعت کشورمان به دانش کنترلی چکیده ای از مفاهیم کاربردی که در صنعت مورد نیاز است در مطلب آموزشی گنجانده خواهد شد. بدیهی است در خلاصه ای از مطالب نمی توان تمام و کمال به این مطلب مهم پرداخت و سعی بر آن است تا حد توان مطالبی کاربردی و آموزنده جهت ارتقا کیفی استفاده از کنترل کننده گنجانده شود.
- تعریف مفاهیم کنترلی: [1]
قبل از شروع به عنوان مطلب لازم با مفهوم و کاربرد برخی از اصطلاحات دنیای کنترل آشنا شویم.
- تئوري كنترل يك شاخه مياني از علم است مابين مهندسي و رياضات.
- کنترل مجموعه اي از اجزا و سيستم ها كه در كنار يكديگر قرار مي گيرند به منظور دست يافتن به رفتار مطلوب
- سيستم: سيستم براي افراد مختلف مي تواند نماد يا تعريف هاي متفاوتي داشته باشد. مانند: اتومبيل، ماشين لباسشويي، ماشين CNC و …. تمامي سيستم ها داراي مشتركاتي در تعريف هستند:
- سيستم ها داراي ورودي و خروجی هستند
- سيستم هایی داراي خروجي هستند كه با تغيير در ورودي ها مي توانند تغيير كنند
- سيستم ها ميتوانند بيش از يك ورودي و/يا بيش از يك خروجي داشته باشند
کنترل از نظر نوع کنترل و یا نوع روش کنترلی به انواع مختلفی تقسیم خواهد شد : کنترل حلقه باز و بسته و کنترل کلاسیک و هوشمند. با توجه به بیان خلاصه مطالب در این مطلب آموزشی چنانچه تمایل به مطالعه بیشتر در این زمینه هستید میتوانید از مراجع ذکر شده در انتها استفاده بفرمایید.
- آشنایی با انواع سیستم های کنترل در صنعت[2]
در هر فرآیند صنعتی (در صنایع و کارخانجات مختلف)، نیاز به سیستمی است که بتواند بخش های مختلف فرآیند را تحت کنترل قرار دهد تا محصول نهایی تولید شود. به این سیستم، سیستم کنترل گفته می شود. بدیهی است که هیچ کارخانه ای را نمی توان بدون سیستم کنترل راه اندازی نمود، لذا در همه کارخانجات و صنایع، سیستم کنترل وجود دارد. اما آنچه از دیرباز تا کنون در صنایع مختلف تغییر نموده است، نوع سیستم کنترل است
حال که با مفاهیم اولیه کنترلی آشنا شدیم به کاربرد کنترل کننده PID[1] می پردازیم.
- PID کنترل چیست:
کنترل کننده ذکر شده شاخه از انواع کنترل کلاسیک است و در صنعت نقش مهمی را ایفا میکند. خصوصا اگر لازم باشد در زمان معینی به مقدار ثابتی دست پیدا کنیم مثل دما!
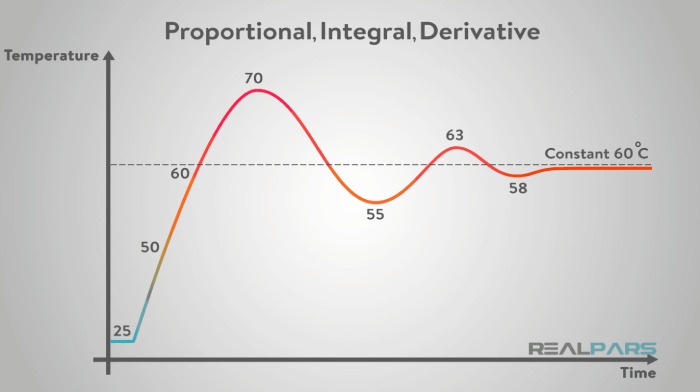
Figure 1نمای کلی نمودار یک کنترل کننده [3]PID
همانطور که مشخص است نمودار فوق یک کنترل کننده PID را برای رسیدن به دمای 60 درجه سانتی گراد نمایش میدهد.
در این نمودار مقدار دمای حاضر[2] آنقدر تغییر خواهد کرد تا به دمای مد نظر[3] برسد. در بین این مسیر کننترل کننده دائما از یک سنسور دما برای اندازه گیری استفاده کرده و فرمان قطع و یا وصل را صادر میکند. این فرآیند آنقدر ادامه پیدا میکند تا مقدار دمای اندازهگیری شده از طریق سنسور به دمای مطلوب رسیده باشد.
این یک مثال کاربردی از کنترل کننده مذکور بود برای درک آسان تر روند کاری کنترل کننده. ولی برای قطع و وصل شدن خروجی کنترل کننده در زمان به موقع نیاز به تنظیم های ضرایب این کنترل کننده است.
- ضرایب کنترل کننده:
این ضرایب شامل سه پارامتر : انتگرالگیر، مشتق گیر و تناسبی می باشند که هر کدام نقش مهمی را ایفا میکنند. به صورت بسیار مختصر به صورت زیر است:
- ضریب تناسبی: سرعت سیستم را افزایش میدهد و خطای حالت دائم را تا حدودی کاهش میدهد (اما صفر نمیکند).
- ضریب انتگرالی: خطای حالت دائم را صفر میکند، اما مقدار زیادی نوسانات ناخواسته (overshoot) به پاسخ گذرا اضافه مینماید.
- ضریب مشتق گیر: نوسانات پاسخ گذرا را تضعیف کرده و پاسخ را به شکل ایدهآل نزدیک مینماید.
در بیشتر تجهیزاتی که امروزه در صنعت استفاده میشود از گزینه هایی نظیر تنظیم خودکار[4] برای دسترسی به این سه ضریب استفاده میشود چرا که برای محاسبه این ضریب لازم است فرمول های ریاضی نسبتا پیچیده ای استفاده شود:
نکته بسیار مهم اینجاست که در سیستم های صنعتی به علت حساسیت پارامتر مشتق گیر به نویز و عوامل ناخواسته، این پارامتر را از سیستم کنترلی حذف میکنند و کنترل کننده به کنترل PI تبدیل میشود. با حذف این پارامتر نوسانات پاسخ گذرا زیاد خواهد شد که در ادامه مطالب به مضرات آن خواهیم پرداخت.
برای سهولت درک اثرات مخرب نبود مشتق گیر در سیستم به پردازش سیستم های کنترلر دما خواهیم پرداخت:
PID های کنترل کننده دما یک نوع مستقل و رایج مورد استفاده در تولید و صنعت هستند.
این کنترل کننده ها کارایی بالایی درکنترل درجه حرارت تجهیزات مختلف دارند و استفاده و راه اندازی از آنها بسیار ساده است.
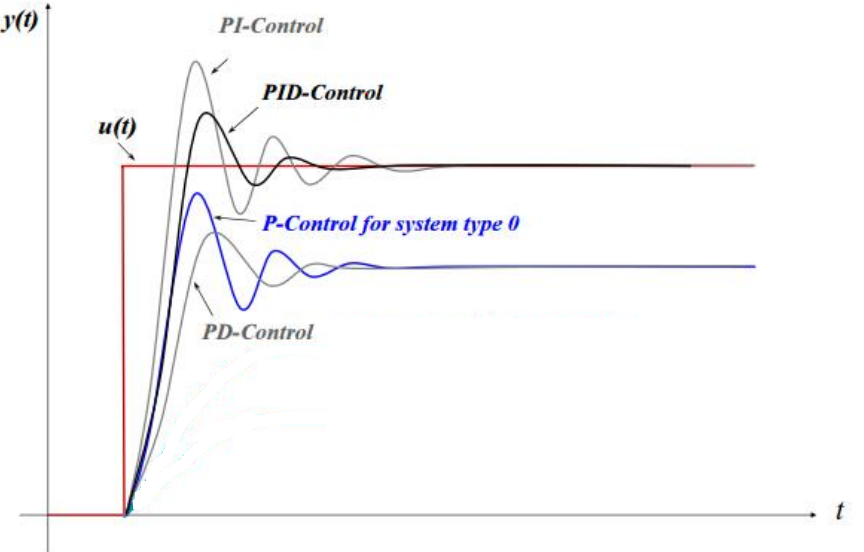
Figure 2 نمای کلی کنترل کننده های PID
همانطور که قبلا گفته شد در اکثر موارد مشتق گیر حذف می شود. شکل فوق نمودار یک کنترل PID را در حذف اثرات ضرایب با یکدیگر مقایسه کرده است. همانطور که قابل مشاهده سیستم PI ( طوسی) از سرعت نسبتا بالاتری برای رسیدن به پاسخ ( نمودار قرمز) دارد ولی به دلیل حذف پارامتر D بالازدگی و پایین زدگی شدیدتری دارد. نمودار مشکی رنگ فرم استاندار PID در حضور هر سه ضریب نشان میدهد و همچنین نمودار PD و P به ترتیب در عدم حضور ضریب I و عدم حضور هر دو ضریب I و ِD نمایش داده شده است که میبینیم سرعت سیستم آنقدر پایین آمده است که با خطای زیادی به پاسخ که نمودار قرمز رنگ است نرسیده است. همچنین به زبان آمیانه حذف D در نمودار باعث ایجاد شدن قله های تیز تری شده است. سوال آنجاست که این پاسخ چه تاثیری خواهد داشت؟ و اگر نتوان از مشتق گیر استفاده کرد راه کار حل مشکل چیست؟
- اثرات نوسانات پاسخ در سیستم های واقعی:
در عمل در یک کنترل کننده دما، هر چقدر با دقت بیشتری کار کند نوسانات پاسخ نیز بیشتر می شود. این نوسان ها برای ثابت نگه داشتن دما در یک بازه تعریف شده ادامه خواهند داشت. این یعنی از خروجی کنترل کننده به صورت مداوم فرمان قطع و یا وصل مشعل و یا هیتر صادر خواهد شد تا برای مثال برای رسیدن به دمای 60 درجه سانتی گراد، کران خطای دما بین 58 درجه و 62 درجه ثابت شود. این فرآیند از طریق یک رله اتفاق می افتد.
فرض کنید نمودار [1] متعلق به یک سیستم کنترلی دما باشد که فرمان PID را به یک المنت جهت ثابت شدن دما منتقل کند. با رسیدن به دمای مطلوی کنترل کننده با سرعت بیشتری فرمان قطع و وصل را منتقل خواهد کرد و روشن و خاموش شدن مداوم قطعات در دنیای واقعی منجر به آسیب رسیدن به آنها و نهایتا از کار افتادگی میشود. با توجه به اجتناب ناپذیر بودن نیاز استفاده از کنترل دقیق PID این آثار مخرب را چگونه می تون حذف کرد؟ پاسخ استفاده از کنترل توان های تریستوری است.
- کنترل توان تریستوری[5] چیست؟
کنترل توان تریستوری از طریق محدود کردن سیگنال جریان و ولتاژ سبب کنترل هموار تر و همچنین دوام عمر تجهیزات میشود.
- TPR چگونه عمل میکند؟
طول عمر هر تجهیز الکتریکی و الکترونی به دو عامل مدت زمان روشن بودن و تعداد خاموش روش شده آن بستگی دارد. برای جلوگیری از سوختن قطعات و کنترل دما باید توان آن را کنترل کرد زیرا برای مثال در المنت ها مصرف توان بیشتر معادل تولید دمای بیشتر است. از طرفی همانطور قبلا گفته شد روشن و خاموش شدن المنت برای کنترل توان راهی غیر اقتصادی در خطوط تولید است.
طبق رابطه توان :
P(t) = V(t) × I(t)
که در آن p معادل توان، V معادل ولتاژ، I واحد جریان و t واحد زمانی است.
در صنعتت امروز به جای روشن و خاموش کردن قطعات که منجر به صفر شدن توان تولیدی می شود از رابطه فوق برای محدود شدن توان استفاده می کنند. فرض کنید در رابطه فوق میزان جریان و یا ولتاژ به 0.0000000001 کاهش پیدا کند، مفداری نزدیک به صفر! این امر باعث می شود توان تولیدی به شدت کاهش پیدا کند. کاهش توان تولیدی محدود شدن گرما و کنترل پذیری آن را به همراه دارد. از طرفی از آنجایی که این رقم نزدیم به صفر است و توان تولیدی را کاهش داده است جز ساعات کاری تجهیز حساب نشده و طول عمر را زیاد میکند. همچنین از روشن خاموش شدن مکرر بار برای ثابت شدن دما نیز جلوگیری شده است.
این وظیفه را در یک سیستم TPR برعهده میگیرد.
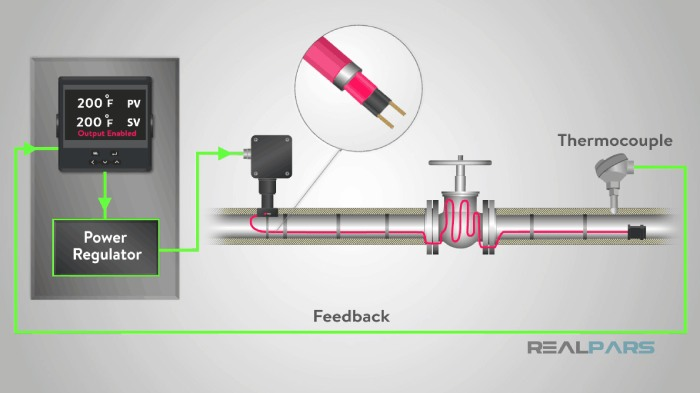
Figure 3شمای جایگاه TPR در سیستم[3]
همانطور که از شکل فوق مشخص است، این وسیله بین کنترل کننده و بار قرار می گرد. سیگنال کنترلی و یا همان فرمان PID ابتدا وارد TPR شده و سپس با پردازش این سیگنال TPR خروجی جریان و یا ولتاژی که به بار منتهی میشود را کاهش و یا افزایش میدهد. در تعبیر آسان تر، با این فرآیند خروجی مطلقا قطع و یا وصل PID تبدیل به یک سیگنال پیوسته و هموار[6] تبدیل خواهد شد که ضمن بالا بردن عمر بار، با حذف شدن انتقال پیک های کنترلی (بالازدگی ها و پایین زدگی ها)[7] کنترل با کیفیت تری را ارائه خواهد داد.
امیدوارم هستیم مطالب گفته شده مفید واقع شده باشد.
با تشکر
[1] http://railway.iust.ac.ir/files/rail/Booklet_Teach/linear_control_systems_moaveni.pdf [2] https://sabzdanesh.com [3] https://namatek.com[1] Proportional Integral Derivative
[2] Present Value
[3] Set Value
[4] Auto Tune
[5] Thyristor Power Regulator
[6] Smooth
[7] Overshoot and Undershoot